Mars Rover Challenge
University of Waterloo Robotics Team
University of Waterloo Robotics Team
Welcome to the University of Waterloo Robotics Team! Our mission is to innovate, inspire, and excel in the field of robotics, the University of Waterloo Robotics Team unites passionate students to design an advanced rover that pushes the boundaries of autonomous exploration. Through dedication, collaboration, and rigorous engineering, we strive to compete in the University Rover Challenge each year, representing Waterloo at a global stage. We commit to technological excellence, teamwork, and the pursuit of knowledge that drives the future of space exploration.
Thank you to the Waterloo Student Design Centre, the Waterloo Engineering Endowment Foundation, and all of our incredible sponsors for their unwavering support, guidance, and resources. With their support, we are able to consistently evolve and refine our work, enabling us to compete against universities from around the world. We are always looking for opportunities to engage with new sponsors.






Meet the subteams that make up our multidisciplinary group, working together to design, build, and compete.


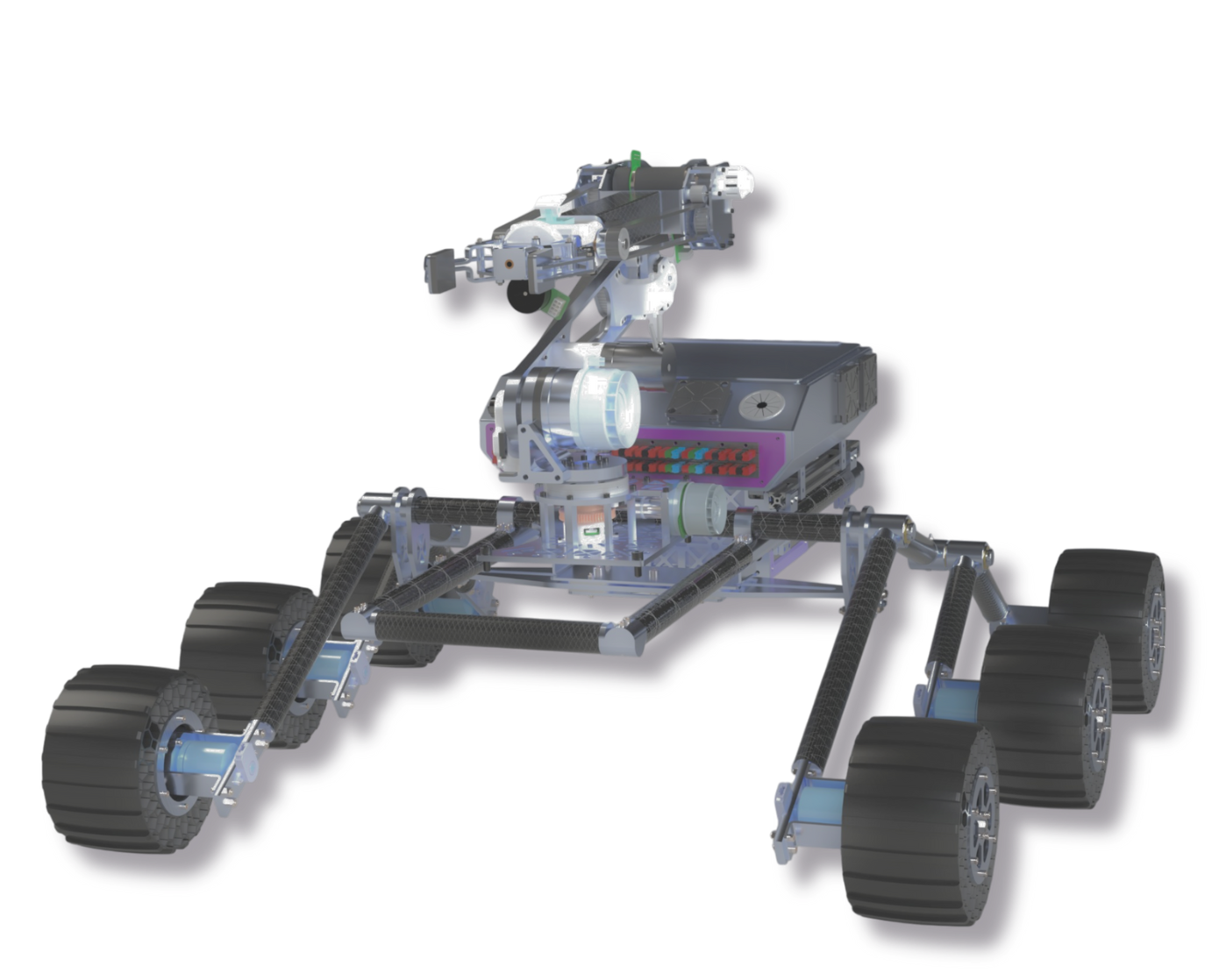
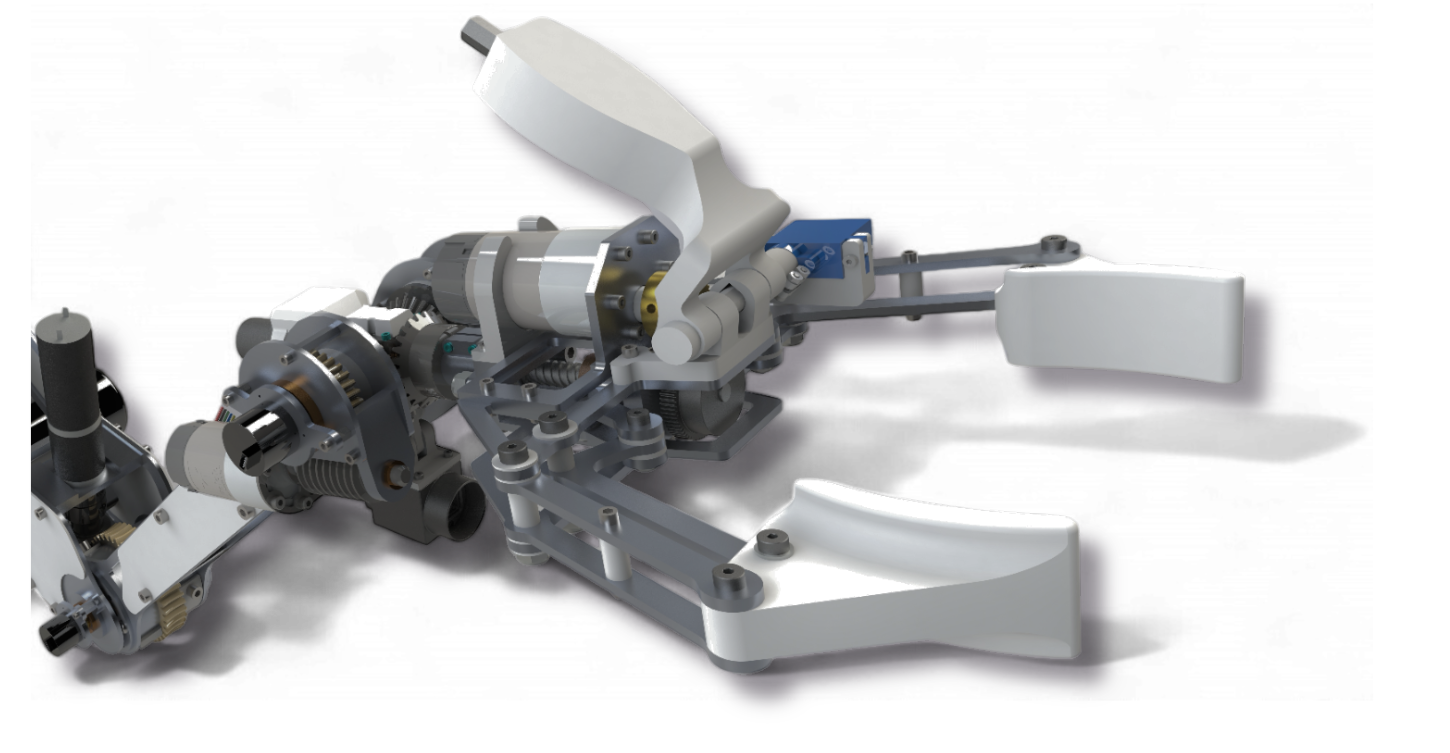
Applying strong engineering principles, the Mechanical team designs the physical rover system. Modelling components with creative intuition and integrating sub assemblies using SolidWorks, performing FEA validation using Ansys; multi-body dynamics simulation using ESI’s SimulationX, etc. Members design jigs, experiments and testing plans to validate design calculations and simulation results all to ensure the robot meets competition and safety standards.

responsible for designing, building, and testing the rover's power architecture and electrical integration systems. This includes work in three primary areas: PCB board design, system integration, and rapid prototyping. Team members use design and simulation software, such as WeBench, Altium, and LTspice, to develop and validate designs, create PCB layouts, and conduct thorough design reviews. They handle prototyping and assembly, which involves soldering, creating prototype PCBs, and managing wiring and harnessing. Physical testing of the boards and power systems is performed using tools like oscilloscopes, multimeters, electronic loads, and power supplies.

The firmware subteam works to bridge the gap between hardware and software by developing custom drivers and embedded code to control our rover subsystems. You will have the opportunity to learn about the many types of communication protocols that are standard in aerospace and vehicle design. From testing hardware using equipment such as oscilloscopes and multimeters, to writing C code for embedded STM32 boards, there are a variety of ways to help facilitate proper communication between rover modules!

The software team is responsible for developing and maintaining the code that operates both the rover's onboard Nvidia Jetson and the base station used for control. Working with technologies like ROS2 and C++, they integrate custom sensor data and user controls to bring the rover’s functionality to life. Key areas of focus include creating a user-friendly interface for remote operation of the rover and its robotic arm, implementing autonomy functions for path planning and object detection, and developing precise control systems for the arm’s movements. They also create and enhance simulations in Gazebo to test and refine the rover’s capabilities in realistic scenarios, ensuring smooth and reliable autonomous operations.

The business subteam is in charge of the behind-the-scene work for the robotics team, ensuring that the whole team can function as a professional entity. Business members will engage with the university and extended community to foster partnerships and gain funding for the competition. They help with the organization of events, merch, and team wellness, creating a welcoming environment for members!

William Melek
Faculty Advisor

Charbel Azzi
Faculty Mentor

Brandon Dehart
Faculty Mentor
If you have any questions or inquiries, feel free to reach out to us!
Email: uwaterloorobotics@gmail.com